Now in its 22nd year, the Saatchi & Saatchi New Directors’ Showcase hit Cannes again, unveiling another presentation of the new directorial talent. Marshmallow Laser Feast (Robin McNicholas, Memo Akten and Barnaby Steel) were the creative and technical directors of the production which included a theatrical performance by 16 flying robots reflecting light beams on the stage. CAN got the all the details on how this mesmerising performance came into being.
Although that it's branded (Saatchi) and in a typical "communication style" (the infamous "wow" effect of some marketing staff), the performance remains technically impressive. Especially the work of the robotic guys (KMel Robotics). A good address for future works!
We have a project with flying robots in the drawer for some times now (in fact since 2006... when we wanted to do something with blimps in the frame of a forthcoming research project).
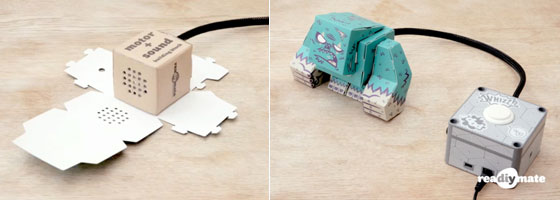
reaDIYmate: Wi-Fi paper companions
"reaDIYmates are fun Wi-fi paper companions that move and play sounds depending on what's happening in your digital life. Assemble them in 10 minutes with no tools or glue, then choose what you want them to do through a simple web interface. Link them to your digital life (Gmail, Facebook, Twitter, Foursquare, RSS feeds, SoundCloud, If This Then That, and more to come) or control them remotely in real time from your iPhone."
According to an article in GOOD, the company that produces these robots (Kiva Systems) has just been acquired by Amazon (obviously to automate its warehouse delivery process).
A short video has been released documenting the brick swarm project mentioned here last month, in which Swiss architects Gramazio & Kohler deploy semi-autonomous flying robots to assemble a structure of foam bricks. However, it's as if the architects underestimate the interest of their own work, fast-forwarding through the bulk of the assembly process as if no one would want to watch such a thing (or perhaps their robots were less graceful than originally hoped). Either way, check out the results, embedded above.
Following our post of last november, here comes the video of the brick swarm construction. Brick being surprisingly THE material of construction for digital fabrication (or not: pixel like), at least for Gramazio & Kohler.
The inside of the greenhouse will be anything but ordinary. Four-metre-high stacks of growing trays on motorized conveyors will ferry plants up, down and around for watering, to capture the sun’s rays and then move them into position for an easy harvest. The array will produce about the same amount of produce as 6.4 hectares (16 acres) of California fields, according to Christopher Ng, chief operating officer of Valcent.
Versus is the latest installation David Letellier, combining the robot mechanics with David’s long time area of exploration - kinetic sound installations, beautifully made. Previously collaborated with Lab[au] on Tessel (see detailed post on CAN), Versus consisting of two kinetic sculptures placed face to face in a space. Each sculpture is made out of 12 triangular panels, hinged and powered by six linear actuators, controlled by a custom software. At the center of each corolla, a loudspeaker and a microphone allow to play and record sounds.
At regular intervals, each sculpture produces a sound, simultaneously recorded and analyzed by the opposite sculpture, which then moves according to the frequencies of this sound. Like a feedback loop, it then plays back the recorded sound, with the errors and disturbances caused by the reverberating space and the visitors.
Researchers are developing hacking drones that could build a wireless botnet or track someone via cell phone.
By Robert Lemos
Hacking on high: The SkyNet drone, built from a toy quadricopter and a small computer, can fly for up to 13 minutes, or land and then operate for nearly two hours.
Credit: Stevens Institute of Technology
The buzz starts low and quickly gets louder as a toy quadricopter flies in low over the buildings. It might look like flight enthusiasts having fun, but it could be a future threat to computer networks.
In two separate presentations last month, researchers showed off remote-controlled aerial vehicles loaded with technology designed to automatically detect and compromise wireless networks. The projects demonstrated that such drones could be used to create an airborne botnet controller for a few hundred dollars.
Attackers bent on espionage could use such drones to find a weak spot in corporate and home Internet connections, says Sven Dietrich, an assistant professor in computer science at the Stevens Institute of Technology who led development of one of the drones.
"You can bring the targeted attack to the location," says Dietrich. "[Our] drone can land close to the target and sit there—and if it has solar power, it can recharge—and continue to attack all the networks around it."
[Image: Optically tagged "robot-friendly bed sheets" from With Robots by Diego Trujillo-Pisanty].
Diego Trujillo-Pisanty, currently a student in the Design Interactions department at the Royal College of Art in London, has looked ahead at how future homes might be redesigned to accommodate domestic robots.
Rather than build entire forms of architecture, however, Diego suggests that we'll first begin quite simply: retrofitting our interior environments, in often deceptively small ways, for optical navigation by autonomous mobile home systems. This will primarily take the form of peripheral additions to everyday objects, as well as a new range of optical tags that will allow certain tasks—folding blankets, for instance, or setting the dinner table—to be accomplished much easier by machines.
These tags will define both physical limits and the spatial operations appropriate within them, coding the everyday home environment for the rise of machine intelligence.
[Image: From With Robots by Diego Trujillo-Pisanty].
Homeowners will even help their robots learn through computational games—like Fröbel blocks for machines.
"Every living space is different," the project description explains, "not only in the architectural layout, but also in the tasks that the tenants require robots to do. For this reason, robots ship only partially programmed so that through a learning algorithm they might adapt to the home they operate in. To accelerate the learning process, special learning tools have been designed to help the robot integrate to a 3D environment." The photograph seen below "shows a living room after a robot self-training session. We can see it has now mastered the physics of equilibrium. It is also evident that it has mistaken one of the house's dinner plates which it has broken with robotic precision to complete its piece."
[Image: From With Robots by Diego Trujillo-Pisanty].
"Robot-friendly" handles will also be added to coffee mugs, the project suggests—which then ripples outward, effecting other spatial dimensions of the domestic environment, including where those mugs are stored. Thus, we read, "the cupboards in which these cups rest have also been altered in order to accommodate the robot. Not only are there tags marking the position of objects, but the doors have also been removed as they were not fit for A.I."
[Image: From With Robots by Diego Trujillo-Pisanty].
Cooking itself will also be altered; the next image seen here "shows how meat has been precisely cut into cubes without leaving any cut marks on the chopping board. The board itself has notches to facilitate robot interaction. In the background the meat package can be seen; it too has been labelled to suggest that the robots operate beyond a single house."
In a recent, highly recommended TED Talk, games designer Kevin Slavin discusses how the design of the physical world is being increasingly optimized for algorithms—and one of his central examples is the Roomba self-guided home vacuum cleaner.
The Roomba, in this context, becomes emblematic of the rise of a new kind of device, one with direct spatial and optical effects on the architecture inside of which it functions.
In fact, it is not difficult to imagine, as both Diego Trujillo-Pisanty's and Kevin Slavin's work suggest, a world in which everyday furniture has been subtly redesigned in order to fit the Roomba's spiraling subroutines—and not the other way around—or even whole rooms peppered with strange, ankle-high optical tags on certain walls, doors, or objects, used to steer the Roomba this way or that at specific points in its room-cleaning operations.
Like a tomb from Egypt's Valley of the Kings, our houses will be covered in hieroglyphs—machine-hieroglyphs, not legible as much as they are optically recognizable.
Now scale this up to the size of, say, Wall-E, and you get With Robots: a spatial environment slightly, almost invisibly, somehow off, idealized not for human beings at all, but for the spatial needs of intelligent objects.
Personal comment:
The usal scientific approach is to try to hide such "markers", but I really think that this approach where you can see the twist, the mix between an environment dedicated to humans and a one dedicated to robot is much more interesting.
It reminds me also a little bit of the project we led back in 2005-7, Variable_environment/, where we created a full interior environment and cloths made out of AR tags, webcameras objects and codes for small robots.
[Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the BBC].
"Artificial clouds" driven by solar-powered engines might be deployed at the 2022 World Cup in Qatar to help keep the stadiums from overheating. Each cloud, as a short video hosted over at the BBC explains, "is constructed from an advanced, lightweight, and strong carbon-fiber material."
The interior of the cloud is injected with helium gas to make it float. The cloud hovers like a helicopter and is remotely controlled. In this way, the cloud hovers over the football ground, shielding it from direct sunlight and providing a favorable climatic environment. The cloud is also programmed to continuously change its shielding position according to the prevailing east-to-west path of the sun.
So much for roofs, then, if you can simply deploy artificial meteorological events in the form of robotic clouds at an estimated cost of $500,000 each...
[Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the BBC].
After all, I suppose it makes sense that the next step in temporary event architecture will be a remote-controlled swarm of rearrangeable horizontal and vertical surfaces, forming ceilings, roofs, walls, floors, ramps, and stairways.
However, justifiable skepticism aside, there is something fantastically interesting in the suggestion that a regional architecture, whose formal and technical history includes several centuries' worth of portable tent design, would—and I exaggerate—leapfrog past the idea of stationary, permanent construction altogether and instead go for something like an on-demand spatial robotics, such as the "artificial clouds" seen here.
Are instantly deployable, remote-controlled sun shielding surfaces—unmanned aerial architecture, perhaps—a kind of unexpected next step in the evolution of tent design? Nomad caravans wander through the desert with strange, helium-filled wireless air pillows whirring quietly overhead. Perhaps they could even be Wifi hotspots. The ErgNet.
According to SciDev.Net, “swarming micro air vehicles” might soon be deployed over disaster areas to set up emergency wireless networks. Developed by scientists at the Swiss Federal Institute of Technology, these flying robots will be “emitting a wireless signal” to establish “temporary radio or mobile communication networks to coordinate the search for survivors.”
“To distribute the vehicles effectively above a designated zone,” the article goes on, the research team “took inspiration from the way ants leave chemical trails to guide colonies to sources of food. Some of the vehicles hover in small circles linked to the location of rescuers and the other vehicles navigate around these markers.”
Elsewhere and earlier, we learned from Wired that, should dictators cut off their country from the internet, there are ways to restore connectivity to the populace. The U.S. military, for instance, has the Commando Solo, a cargo plane converted into an “airborne broadcasting center” that “hypothetically” can boost Wi-Fi bars in bandwidth-denied areas to full strength. Any of the military's aircrafts can be converted into “cell towers in the sky” by attaching cellular pods to their wings or bellies.
To this arsenal, one can supposedly add the above flying robots. When the switch is turned off, they'll be released from their roost to swarm over revolutionary spaces to churn up an electromagnetic storm of Facebook schedules, retweets and Anderson Cooper's adoring visage.
But instead of hovering over disaster and conflict areas, how about urban and rural dead spaces or in even more remote locales? And instead of drones and toy airplanes, you conscript pigeons, starlings and other flying weeds into a wi-fi network of cyborg fauna?
This network needn't be online all the time. The birds, after all, need some rest. So you simply let them loose, say, during rush hour to temporarily augment the network.
One imagines urban homesteaders converting a water tank into an aviary for their robo-starlings, next to their urban apiaries, urban chicken coops and urban farming tool shed. When they need to communicate with other urban homesteaders, either nearby or in another Detroit-like ruin pornscape, they only need to open the hatch. It's an artisanal wi-fi for networked off-grid living.
In order to lessen e-waste, each starling is equipped with a homing beacon, which will signal home should the animal die in flight. The homesteader simply has to trace the electronic beeps to collect the carcass and its outfittings. In the meantime, the beacon will be powered by the decaying organic matter.
This blog is the survey website of fabric | ch - studio for architecture, interaction and research.
We curate and reblog articles, researches, writings, exhibitions and projects that we notice and find interesting during our everyday practice and readings.
Most articles concern the intertwined fields of architecture, territory, art, interaction design, thinking and science. From time to time, we also publish documentation about our own work and research, immersed among these related resources and inspirations.
This website is used by fabric | ch as archive, references and resources. It is shared with all those interested in the same topics as we are, in the hope that they will also find valuable references and content in it.







 [Image: Optically tagged "robot-friendly bed sheets" from
[Image: Optically tagged "robot-friendly bed sheets" from  [Image: From
[Image: From  [Image: From
[Image: From  [Image: From
[Image: From 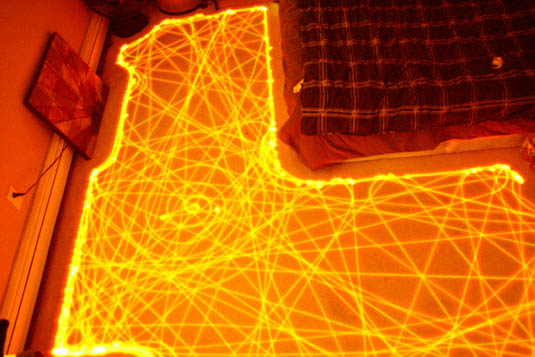 [Image: A
[Image: A 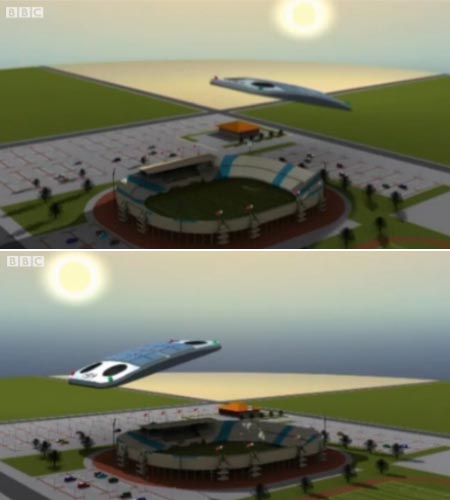 [Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the
[Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the  [Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the
[Images: "Artificial clouds" designed at Qatar University under the direction of Saud Abdul Ghani; images from a video hosted by the 

